

一、ABB机器人奇异点定义

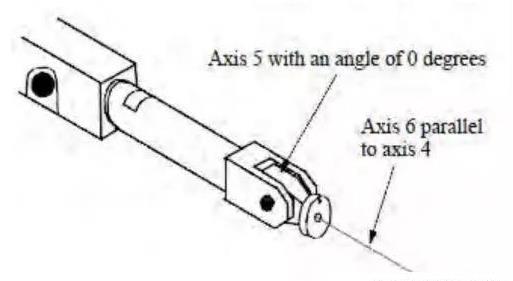
当机器人关节轴5角度为0度,同时关节轴4和关节轴6是一样时,则机器人处于奇异点。
利用无限量的机械臂配置可获得机械臂空间内的某些位置,以确定工具的位置和方位。但在基于工具的位置和方位计算机械臂角度时,这些位置,也就是熟知的奇异点,却成了一个问题。一般说来,机械臂有两类奇异点,臂奇异点和腕奇异点。
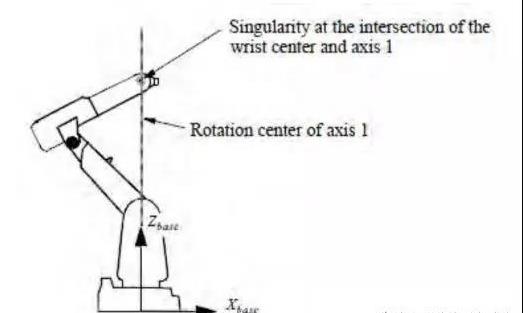
1、臂奇异点:臂奇异点就是腕中心(轴4、轴5和轴6的交点)正好直接位于轴1上方的所有配置。如下图所示:(ABB机器人)
ABB机器人奇异点管理
ABB机器人奇异点管理
腕中心和轴1汇集时出现臂奇异点
2、腕奇异点:腕奇异点是指轴4和轴6处于同一条线上(即,轴5角度为0)的配置。如下图所示:
ABB机器人奇异点管理
ABB机器人奇异点管理
轴5角度为0时出现腕奇异点
二、如何避免解决机器人出现奇异点
1、布局以及夹具设计
在进行工作站布局时候,要考虑机器人和各个设备之间的摆放布局位置,尽量考虑到机器人在工作过程当中,避免机器人经过奇异点;还可以在考虑机器人夹具在工作中对机器人姿态影响,进而避免奇异点。
如果已指定参数Wrist,则对方位进行接头插补,以避免奇异点。在这种情况下,TCP遵循正确的路径,但